2025中国国际应急管理展览会
时间:2025年11月18-20日
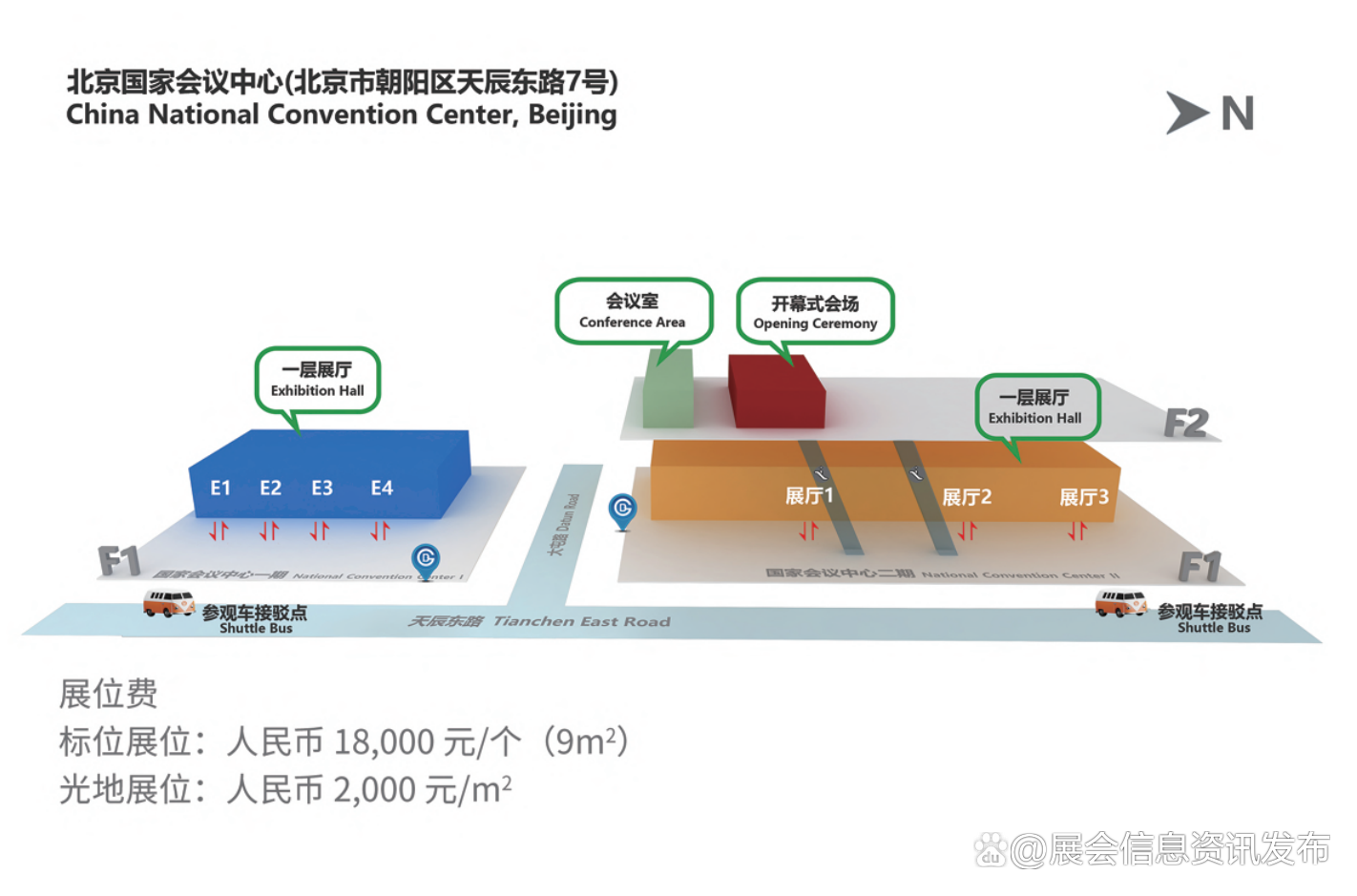
地点:北京国家会议中心(北京市朝阳区天辰东路7号)
主办单位:应急管理部国际交流合作中心
承办单位:北京朗泰华科技发展中心
国际合作承办单位:汉诺威米兰展览(上海)有限公司



中国国际应急管理展览会是由应急管理部、商务部批准,应急管理部国际交流合作中心主办的聚焦应急管理科技装备的国际性展览活动。“定期举办中国国际应急管理展览会”已纳入“一带一路”自然灾害防治和应急管理国际合作机制的14项合作举措。举办中国国际应急管理展览会(以下简称中国应急展),旨在服务“一带一路”自然灾害防治和应急管理国际合作机制发展壮大,突出应急管理科技装备供需对接和国际交流合作,强化科技创新引导作用,助力“智慧应急、科技兴安”,提升应急管理现代化水平。
2025中国国际应急管理展览会将于2025年11月18-20日在北京国家会议中心举办,预计展览面积45000平方米,主办单位将遴选300家中外企业、科研机构、产业聚集地、行业组织,面向各级应急管理部门、各类应急救援力量、各类企业、有关外国机构和国际组织等集中展示应急管理信息化、消防救援、防灾减灾救灾、安全生产及事故救援四个领域的技术装备。
参展单位展示的产品及服务应体现出先进性、实用性、专业性,鼓励进行动态演示,或利用视频、虚拟现实技术进行展示。




某国家矿山应急救援队装备使用与需求情况报告(二)
三、井下侦察机器人类
(一)使用过程中存在的不足
1.复杂地形通过性差
现有机器人的越障能力(如轮式、履带式底盘)难以适应极端崎岖环境,易发生卡滞或倾覆。
2.通讯稳定性弱
井下坍塌可能破坏原有通讯设施,机器人依赖的无线信号(如WiFi、4G)易被金属结构、混凝土阻隔,导致信号中断或延迟,尤其在深部巷道或多层障碍物场景中,实时操控性大幅下降。
3.环境适应性不足
救援现场可能存在高温(火灾场景)、高湿、强粉尘或有害气体(如一氧化碳),部分机器人的电子元件、传感器防护等级不足(如IP65以下),长期运行易出现故障。
4.续航瓶颈
目前多采用锂电池供电,受体积限制容量有限,而复杂环境下机器人移动、传感器运行功耗高,续航时间通常仅2-4小时,无法满足长时间连续侦察需求,且充电不便。
5.多传感器融合精度低
机器人搭载的摄像头、激光雷达、气体传感器等数据易受环境干扰(如粉尘遮挡镜头、烟雾影响激光反射)。
6.自主决策能力薄弱
多数机器人依赖人工远程操控,遥控距离短,自主避障(如识别坍塌风险区域)和任务规划(如优先探测高风险点)能力有限。
7.机械可靠性
关节驱动部件(如电机、齿轮)在粉尘侵入或剧烈震动下易磨损,尤其在攀爬或拖拽过程中,机械结构故障概率升高。
(二)研发方向建议(拟攻关的关键技术)
1.强化复杂地形通过能力
设计可变形、多模态的移动机构,融合轮式、履带式、足式等运动方式优点,使其能在狭窄巷道、陡坡、台阶、坍塌废墟等复杂地形灵活移动,轻松跨越障碍。
2.提升环境适应性
增强机器人在高温、高湿、强粉尘、电磁干扰、易燃易爆等恶劣井下环境的耐受性,采用特殊防护材料和散热技术,确保设备稳定运行。
3.优化通讯性能
开发可靠的井下无线通讯技术,解决信号易受阻挡、干扰导致中断或延迟问题,实现长距离、高速率、低延迟的数据传输。
4.增强侦察与感知能力
集成多类型、高灵敏度传感器,如高清摄像头、热成像仪、气体传感器、雷达等,实现对井下环境全方位、实时感知,提升对生命迹象、气体、地质结构变化的探测精度 。
环境实时监测:持续监测井下温度、湿度、瓦斯、一氧化碳、氧气等气体浓度,以及粉尘含量、风速等环境参数,实时反馈给救援指挥中心 。
5.实现智能化与自主化
引入人工智能、机器学习和深度学习技术,使机器人具备自主路径规划、目标识别、决策判断、故障诊断等能力,降低对人工操控依赖 。
6.提高续航能力
研发高效电源管理系统和新型电池技术,提升能源利用效率,延长续航时间,确保机器人长时间作业 。开发低功耗电路和新型电池,提高能源利用效率和续航时间 。
7.生命探测与定位
搭载先进生命探测仪,精准探测并定位被困人员位置、生命体征,为救援提供关键信息 。
8.高清影像采集与传输
配备高清摄像头和热成像仪,采集井下现场视频和图像,通过无线通讯实时传输,辅助救援人员了解情况 。
9.自主导航与避障
自主构建井下地图,规划安全路径,自动避开障碍物和危险区域 。
10.远程操控
支持远程操控,可根据实际情况切换手动与自动模式 。
11.应急处置与预警
发现异常情况,如气体超标、结构不稳定,立即发出警报,并采取紧急措施。
(三)现阶段满足需求的详细技术参数
1.移动性能
行走速度≥5km/h,可调节;垂直越障高度≥300mm;爬坡能力≥45° 。
2.环境适应参数
工作温度范围-30℃ - 60℃;相对湿度范围0 - 95%RH(无冷凝);防护等级达到IP68;抗电磁干扰能力满足相关标准 。
3.通讯参数
无线通讯距离直线不低于1000m,复杂环境下不低于500m;数据传输速率不低于100Mbps;通讯延迟≤50ms 。
4.传感器参数
气体传感器检测精度,瓦斯±0.1%、一氧化碳±1ppm、氧气±0.5%;热成像仪测温精度±2℃;摄像头分辨率不低于4K 。
5.续航参数
内置电池续航时间不低于16h,充电时间≤2h;也可外接电源供电 。
6.负载能力
可搭载设备总重量≥30kg 。
四、井下救援排水机器人类
(一)使用过程中存在的不足
1.井下环境复杂多变,存在坍塌、积水、淤泥、狭窄通道等多种恶劣状况。救援排水机器人不具备复杂地形下稳定行走作业的能力。
2.采用电缆供电又限制机器人的活动范围,且电缆在井下复杂环境中易缠绕、破损。井下空间有限,机器人需在保证排水效率的前提下,体积大,运输不便。
(二)研发方向建议(拟攻关的关键技术)
1.提升环境适应能力
针对井下积水区域存在泥沙、杂物、坍塌物等复杂情况,开发具备在恶劣环境下稳定运行。研发特殊叶轮和流道设计的水泵,使其在含泥沙、杂物的水中不易被缠绕和堵塞,提高排水可靠性。
2.提升设备可靠性与耐用性
优化结构设计,提高设备的抗冲击、抗震动能力,确保在恶劣井下环境长期稳定运行。选用耐腐蚀、高强度的材料制造机器人外壳和关键部件,提高设备在恶劣环境下的耐用性。
3.拓展多功能集成
除排水功能外,集成环境监测、障碍物检测、简单清障等功能,使其成为综合性救援设备,提高救援效率。
4.小型化
研发小型化高排水能力的机器人。
5.高效排水作业
能在各种复杂工况下进行高效排水,根据积水深度、流量等自动调节排水功率和扬程,确保快速排除积水。
6.水下自主导航与避障
利用声呐、激光雷达、视觉传感器等,实现水下自主导航和避障,可在狭窄、复杂的巷道中灵活移动。
7.环境实时监测
实时监测井下积水的水质、水位、水温、有害气体浓度等参数,为救援决策提供数据支持。
8.远程操控与数据传输
支持远程无线操控,操作人员可在安全区域控制机器人运行;将现场数据和图像实时传输回指挥中心。
9.自动故障诊断与报警
具备自我诊断功能,实时监测设备运行状态,一旦发现故障或异常,立即发出警报并提供故障信息,方便及时维修。
10.简单清障功能
配备机械臂或清障工具,可对排水路径上的小型障碍物进行清理,保障排水作业顺利进行。
11.智能控制与自适应调节技术
利用人工智能和机器学习算法,实现机器人根据环境变化自动调节排水参数、路径规划和避障策略。
12.高效能源管理与新型电池技术
开发低功耗电路和能源回收技术,研究新型电池材料和结构,提高能源利用效率和续航时间。
(三)现阶段满足需求的详细技术参数
1.排水流量
最大排水流量不低于1000m³/h ,可根据实际需求在一定范围内调节。
2.排水扬程
额定排水扬程不低于500m ,能满足不同深度积水的排放要求。
3.移动速度
在水下的移动速度为0.5 - 3m/s ,可灵活调整以适应不同作业场景。
4.通讯距离
水下无线通讯距离不低于300m ,确保远程操控和数据传输稳定。
5.工作水深
可在水深不超过30m 的环境下正常工作。
6.防护等级
达到IP68防护等级,具备良好的防水、防尘、防撞击能力。
7.抗堵塞能力
能适应含泥沙量不高于10%、杂物直径不超过50mm 的复杂水质。
8.设备尺寸与重量
外形尺寸长×宽×高≤2000mm×1000mm×800mm ,重量不超过1000kg ,方便运输和井下作业 。
(未完待续)
某国家矿山应急救援队装备使用与需求情况报告

2025中国国际应急管理展览会(11月18-20日 北京)